
1/ Modélisation des liaisons
Définition :Dans les parties modélisation, cinématique, statique et dynamique, les solides sont considérés INDEFORMABLES.
Un contact entre 2 solides implique une liaison entre ces 2 solides (relative d’un solide par rapport à l’autre).
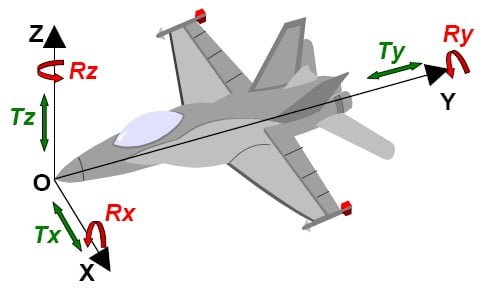
Un mouvement dans l’espace est possible selon 6 directions :
– 3 Translations : TX, TY, TZ
– 3 Rotations : RX, RY, RZ
Nombre de degré de liberté (ddl) dans une liaison = Nombre de mouvements indépendants autorisés par cette liaison.
Nombre de degrés de liaison = Nombre de mouvements indépendants supprimés par la liaison.
2/ Modélisation des contacts entre solides
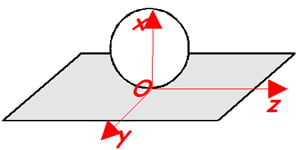
Le contact ponctuel
Exemple : sphère – plan
– origine O : le point de contact
– axe : la normale en O au plan tangent commun
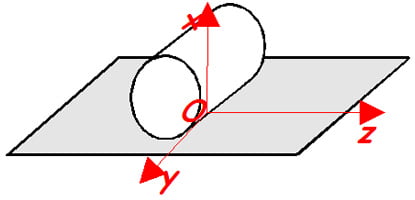
Le contact linéique rectiligne
Exemple : cylindre – plan
– origine O : milieu de la génératrice de contact (segment de droite)
– axe : normale en O au plan tangent commun
– génératrice de contact : l’axe y
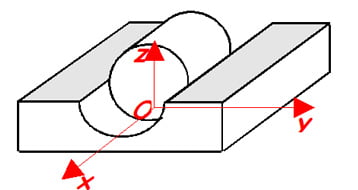
Le contact linéique circulaire
Exemple : sphère – cylindre creux de même rayon
– origine O : le centre de la sphère
– axe : l’axe de la gorge cylindrique
– arc de cercle de contact : Є au plan (O, y, z)
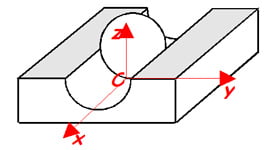
Le contact surfacique
Exemple : cylindre – cylindre de même rayon
– origine O : le centre géométrique des surfaces cylindriques de contact
– axe : l’axe des cylindres
Autres contacts surfaciques :
– Sphérique : sphères de même rayon,
– Conique : cônes de même angle au sommet.
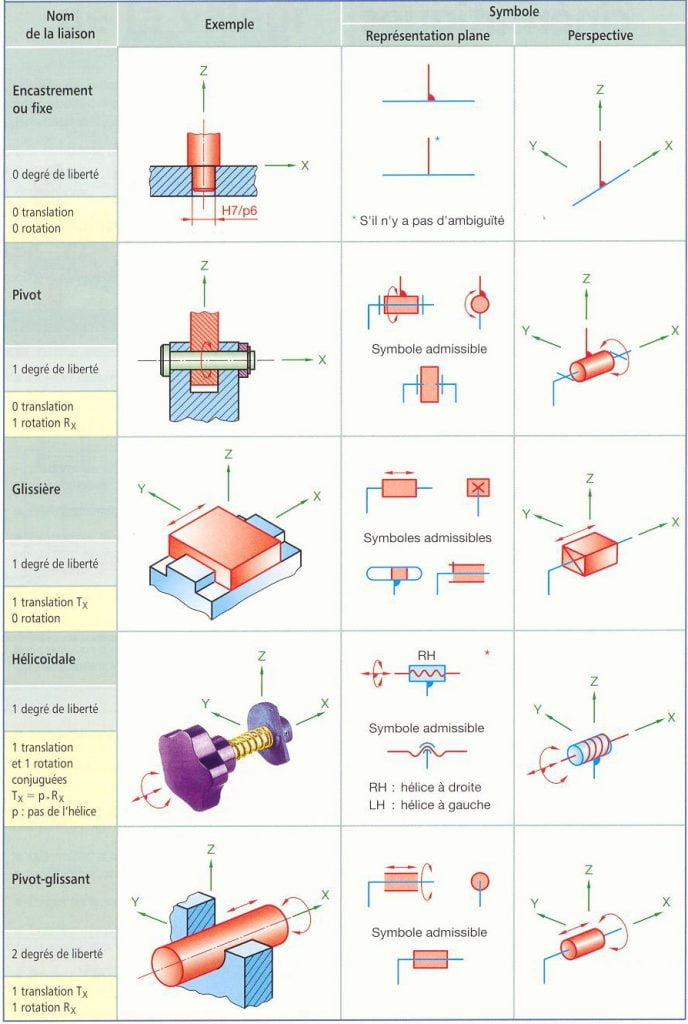
3/Le tableau de modélisation des liaisons
4/Constitution des Classes d’Equivalence Cinématique (C.E.C.)
Une C.E.C est un ensemble de pièces n’ayant aucun mouvement relatif les unes par rapport aux autres (liaison encastrement ou complète).
Pour aider à la compréhension, choisir une couleur différente par C.E.C.
Exceptions : ne sont pas considérés dans cette modélisation, ce sont les pièces à exclure de toutes classes d’équivalence :
– les pièces déformables (ressort, membrane…).
– les éléments roulants (billes…) ne servant qu’à réaliser une liaison entre deux solides.
5/Graphe des liaisons
– Tableau des liaisons entre C.E.C. :
Noter s’il y a un contact ou non entre chaque C.E.C (deux à deux), dans la phase considérée (ne pas tenir compte des butées en fin de course…).
Pour les C.E.C en liaison, lister les degrés de liberté, puis nommer et caractériser la liaison (cf. symboles normalisés)
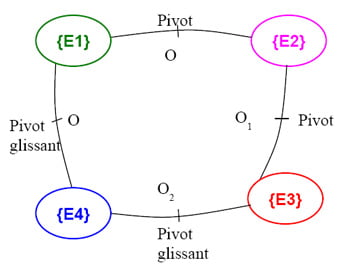
– Réalisation du graphe des liaisons :
6/Schéma cinématique minimal
a) Identifier le repère de l’étude (schéma plan ou spatial)
b) Placer les centres des liaisons. Si des liaisons se superposent, déplacer certains centres de liaison, en respectant la caractéristique de la liaison.
c) Schématise les liaisons, en respectant les couleurs des C.E.C (chaque liaison doit comporter 2 couleurs, représentant les 2 C.E.C. en contact).
d) Pour chaque C.E.C, relier les parties du C.E.C. entre elles (mêmes couleurs) par des traits, si possible schématisant approximativement la forme des pièces réelles.
e) Ajouter le symbole du bâti sur le C.E.C. fixe :

